Mars Exploration Rover Wheel Mobility
NASA’s Mars Exploration rovers (MER) Spirit and Opportunity conducted the most successful exploration of a planetary surface in history. Rover mobility, critical to the MER’s exploration successes, presented few challenges with the exception of some occasions when the rovers became bogged in soils with wheel slips near 100%. These bogging events demonstrated that loss of rover mobility from high wheel slip events was a serious hazard to mission success and pointed to the need for a realistic model to simulate rover wheel mobility at high slip.
The Coupi DEM was used to simulate MER rover wheel mobility for wheel slips from zero to 99%. Model development was guided by using the physical parameters of Mars soil simulant, MIT MER wheel mobility tests and DEM simulations of triaxial soil strength tests to match physical and DEM particle internal friction.

Figure 1: Opportunity rover wheel tracks after recovery from bogging down in Purgatory dune (Credit NASA/JPL-Caltech)
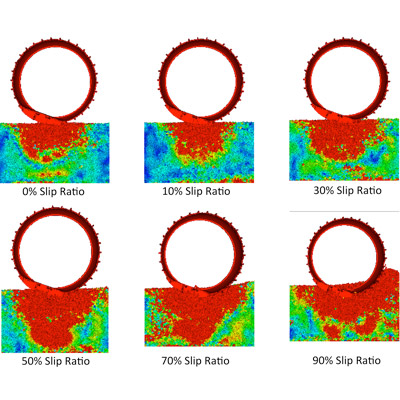
Figure 2: Coupi DEM simulation results showing MER steady state wheel sinakge and soil force network for wheel slip from 0 – 90%.
The DEM model was calibrated and validated using MIT test data for wheel slips up to 50%. Model simulations predicting wheel mobility from 50% to 99% that exceeded the range of known experimental data were shown to be accurate from NASA Glenn Research Center test data. The DEM simulation results are used to define wheel/terrain interactions for the MER rover vehicle dynamics model (ARTEMIS). The approach combines the accuracy of the DEM to describe wheel mobility with the computational efficiency of the ARTEMIS vehicle dynamics model of the MER rover.
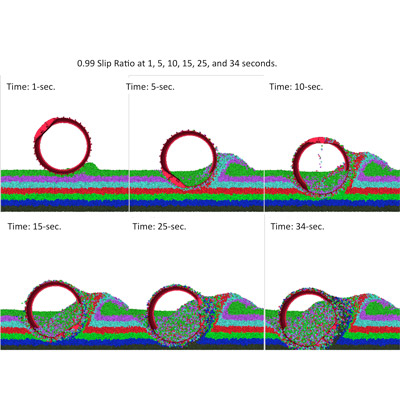
Figure 3: Coupi DEM simulation results showing MER time-dependent wheel singage for wheel slip of 99%.
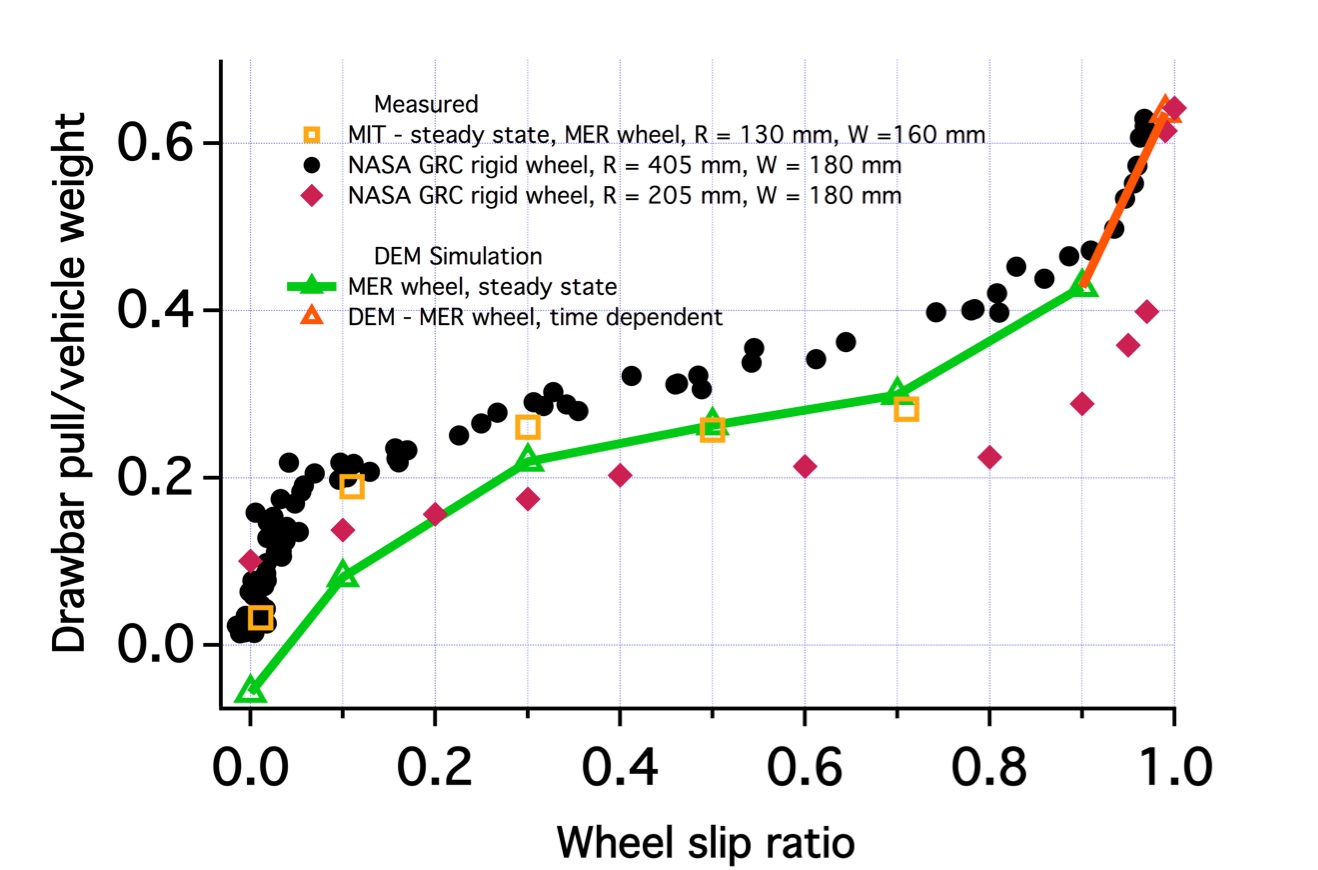
Figure 4: Comparison of Coupi DEM simulation of rover wheel mobility with test data from MIT and NASA Glenn Research Center showing the agreement between simulated and measured wheel drawbar pull (the pulling force of the wheel).
Description of this work and related information about DEM simulation of Mars soil can be found at:
Johnson, J. B., Duvoy, P. X., Kulchitsky, A. V., Creager, C. & Moore, J. (2017) Analysis of Mars Exploration Rover wheel mobility processes and the limitations of classical terramechanics models using discrete element method simulations. J. Terramechanics. Vol. 73, P. 61-71 Johnson, J. et al. 2015. Discrete element method simulations of Mars Exploration Rover wheel performance, J Terramechanics, 62, 31-40, (2015) Zhou, F. et al. 2014. “Simulations of Mars Rover Traverses.” Journal of Field Robotics 31(1): 141-160 Knuth, M. A., et al. (2012). “Discrete element modeling of a Mars Exploration Rover wheel in granular material.” Journal of Terramechanics 49: 27-36.